reklama
Dálkově ovládaná auta jsou jistě zábavná, ale vlastní řízení robotická auta jsou ještě zábavnější. V tomto tutoriálu postavíme čtyřkolový robot, který dokáže pojíždět a vyhýbat se překážkám. koupil jsem tato kompletní sada 4WD od AliExpress, ale většinu těchto součástí můžete snadno zakoupit v obchodě s elektronikou a dát si je dohromady.
Doporučuji přečíst si všechny pokyny dříve, než začnete, protože to objasní některé věci, které by mohly být matoucí při prvním průchodu. Také to může vzhledem k délce pokynů vypadat jako velmi dlouhý, pokročilý projekt, ale ve skutečnosti je to docela jednoduché. Není třeba zastrašit - jedná se o projekt na úrovni začátečníků, s nímž můžete dosáhnout uspokojivých výsledků, a poté se můžete dozvědět více. Nelíbí se vám tento styl robota? Tady je víc Arduino roboti 8 robotů Arduino, které můžete stavět za méně než 125 USDArduino umí hodně, ale věděli jste, že dokáže vytvořit plnohodnotné roboty? Pro docela levné, taky! Přečtěte si více místo toho můžete snadno stavět.
Po vyjmutí všeho z obalu máme toto:

Nejprve připojíme motory a můstek H (karta, která dodává energii do motorů) ke spodní části podvozku. Nejprve připojte čtyři kovové držáky (jsou to obdélníkové, vrtané kovové bloky) ke každému motoru pomocí dvou dlouhých šroubů a dvou matic.
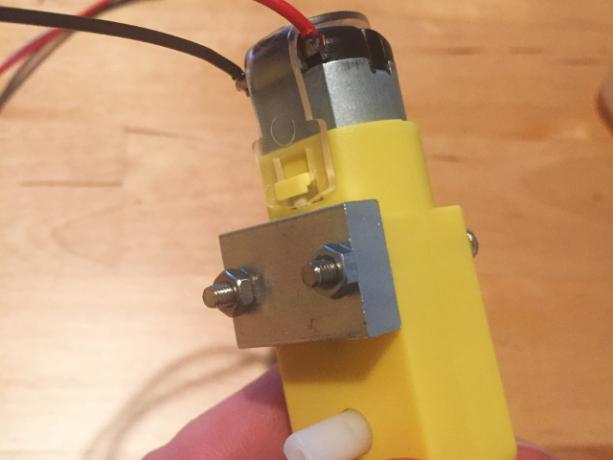
Musíte se ujistit, že jsou správně připojeny, takže se podívejte na obrázek níže a ujistěte se, že strana bloku se dvěma vyvrtanými otvory bude směřovat dolů. Mějte na paměti, že vodiče každého motoru směřují ke středu podvozku.
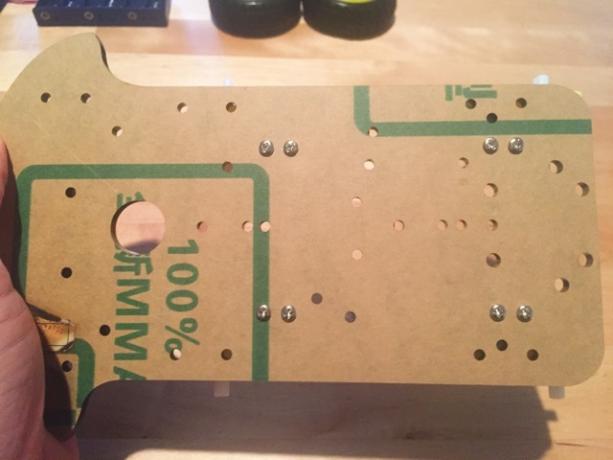
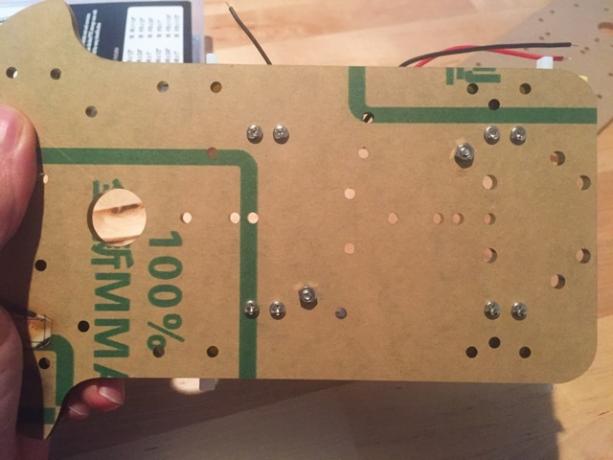
Nyní může být každý motor připevněn k podvozku pomocí dvou krátkých šroubů ve spodní části každé kovové konzoly. Zde je pohled na spodní část podvozku, abyste viděli, kde musí být šrouby:
Dalším krokem je zajištění mostu H (to je červená deska, v mé sadě) k podvozku. Možná budete chtít počkat, až budou všechny vodiče připojeny k mostíku H, než to uděláte, ale to je jen na vás (zjistil jsem, že je to jednodušší). Rychlá poznámka: v mé sadě chybělo několik spojovacích prostředků, a tak jsem k zajištění mostu použil elektrickou pásku. Zde však můžete vidět, kam by šly šrouby a matice:
Nyní, když je připojen most H, můžete začít zapojovat napájení. Protože držák baterií se šesti AA je dodáván s adaptérem na stejnosměrný proud, budete muset buď odříznout konec (což jsem udělal), nebo spustit vodiče propojek k samotným bateriím.

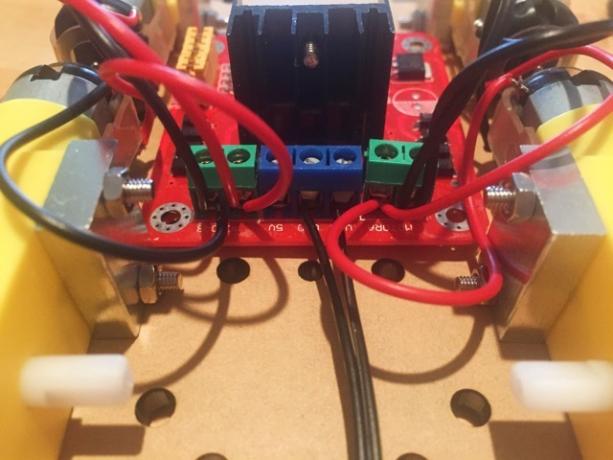
Bez ohledu na to, jak se to rozhodnete, spustíte kladný vodič do portu označeného „VMS“ a záporný vodič do portu označeného „GND“ na mostě. Zašroubujte upevňovací prvky a ujistěte se, že jsou bezpečné. Poté připojíte vodiče motoru. Na obou stranách je sada dvou portů; jeden je označen jako „MOTORA“ a druhý „MOTORB.“ Oba červené dráty na každé straně půjdou do nejzazšího zeleného přístavu a oba černé dráty půjdou do nejvzdálenějšího. Tento obrázek by měl být jasnější:
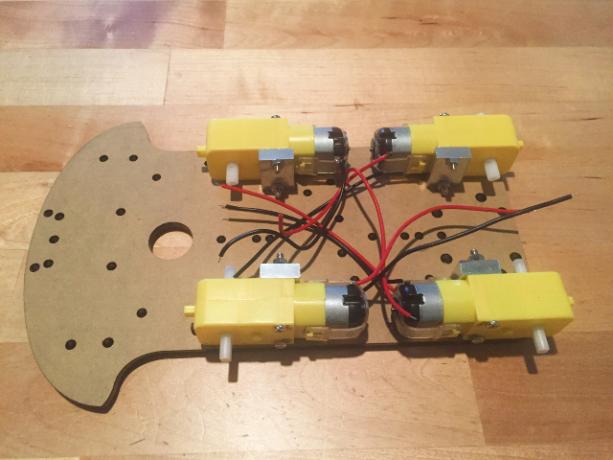
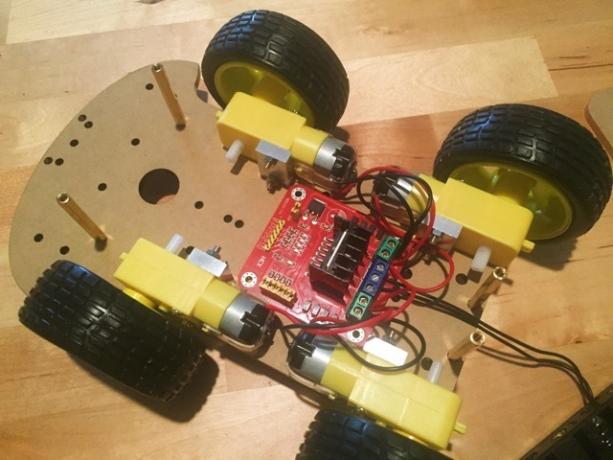
Zjistil jsem, že musím odtrhnout část skříně od motorových drátů, aby to fungovalo. Nyní, když máte všechny motory a napájecí zdroj zapojeny, nasaďte kola na hnací hřídele motoru a připojte čtyři měděné hřídele v místech zobrazených na obrázku níže (každý měděný hřídel potřebuje jeden malý šroub). Tento robot se začíná formovat!
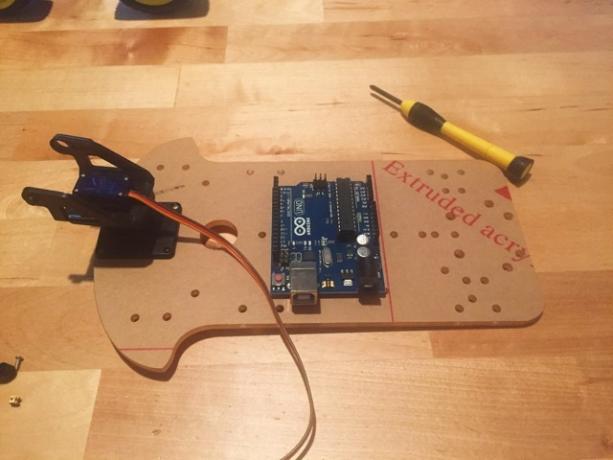
Nyní odložte tu část podvozku a uchopte druhou, která bude sedět nahoře. Dalším krokem je připevnění Arduina - znovu jsem musel použít elektrickou pásku, ale měli byste být schopni lépe zabezpečit své pomocí šroubů a matic.

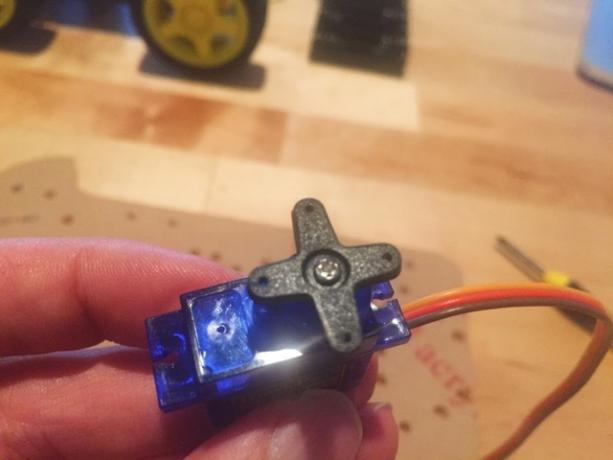
Další krok vyžaduje mikro servo, černý kříž, držák serva (který se skládá ze tří černých plastových kusů) a některé malé šrouby. Připojte černý křížový kus k mikro servo pomocí jednoho z větších ostrých šroubů v sadě:
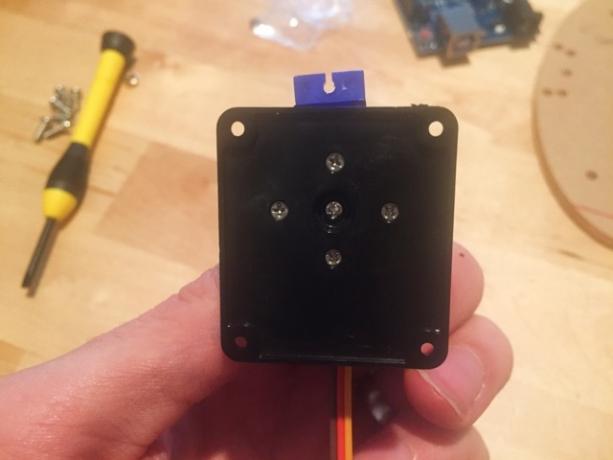
Poté otočte servo hlavou vzhůru nohama do černého plastového kroužku držáku. Ujistěte se, že dráty vycházející ze serva směřují ve stejném směru jako delší část držáku (opět viz obrázek níže) a pomocí čtyř malých šroubů zajistěte příčku (v držáku jsou čtyři otvory, které se zarovnávají s otvory na příčka).

Vypadá to, jak vypadá poté, co je připojen:
Nakonec vezměte zbývající dva kusy držáku serva a zacvakněte je na servo (v postranních dílech jsou drážky, které odpovídají plastovému poutku na servě).
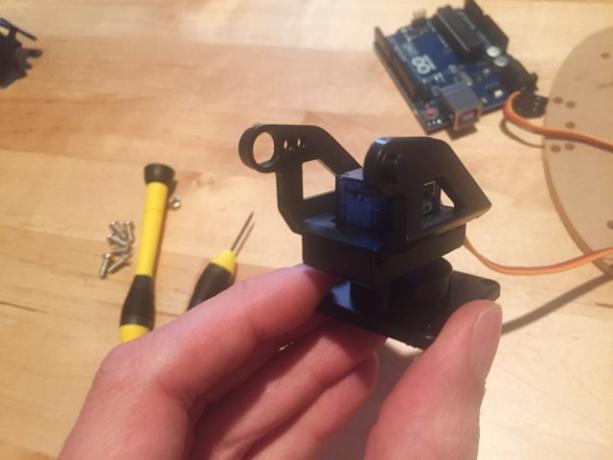
Jakmile je držák serva kompletní, lze jej namontovat na podvozek.
Zde jsou šrouby:
Je čas dát našemu robotovi nějaké oči. Připojte ultrazvukový senzor k držáku serva pomocí dvou stahovacích pásek.

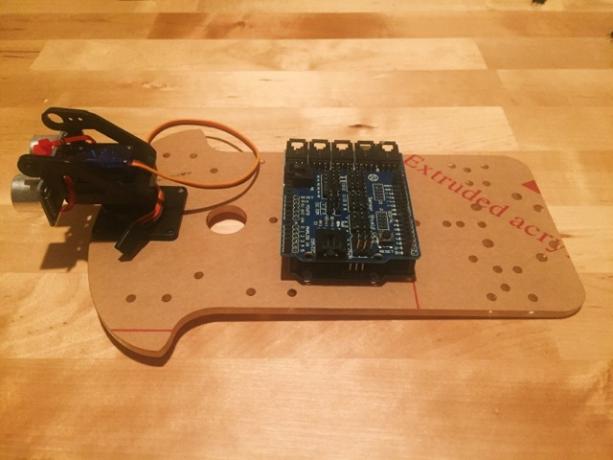
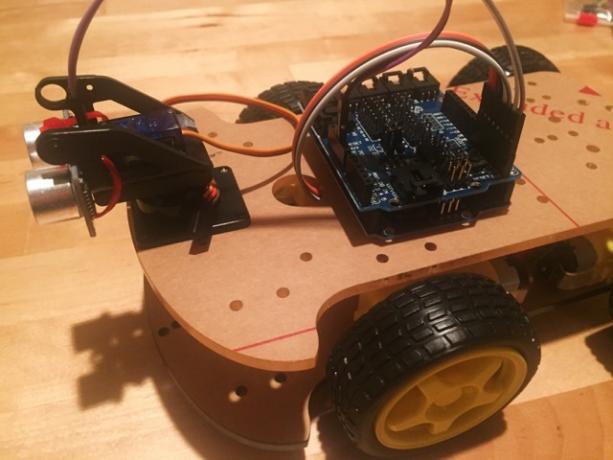
Pokud pracujete ze stejné sady jako já, dostanete štít čidla Arduino. V této sestavě ji nebudeme používat, ale pokud to chcete, můžete ji nyní umístit na vrchol UNO (jak vidím na obrázku níže). Stačí zarovnat kolíky na spodní straně štítu s I / O porty na Arduinu a stiskem dolů je spojit. Momentálně to nepotřebujete, ale štíty se mohou hodit Nejlepší 4 štíty Arduino pro supervelmoc vašich projektůKoupili jste si startovací soupravu Arduino, řídili jste se všemi základními průvodci, ale nyní jste narazili na úrazový kámen - pro realizaci elektronického snu potřebujete více bitů a bobů. Naštěstí, pokud máte ... Přečtěte si více .
Ať už připojíte štít senzoru nebo ne, budete nyní potřebovat čtyři dráty pro připojení ultrazvukového senzoru k Arduino. Na senzoru jsou čtyři kolíky, VCC, GND, TRIG a ECHO. Připojte VCC k 5V pinu na Arduino, GND na GND a TRIG a ECHO na I / O piny 12 a 13.
Nyní uchopte spodní část podvozku a připojte šest propojovacích vodičů k I / O kolíkům mostu H (jsou označeny ENA, IN1, IN2, IN3, IN4 a ENB). Vezměte na vědomí, jaké barevné vodiče jsou připojeny ke kterým portům, jak budete vědět později.

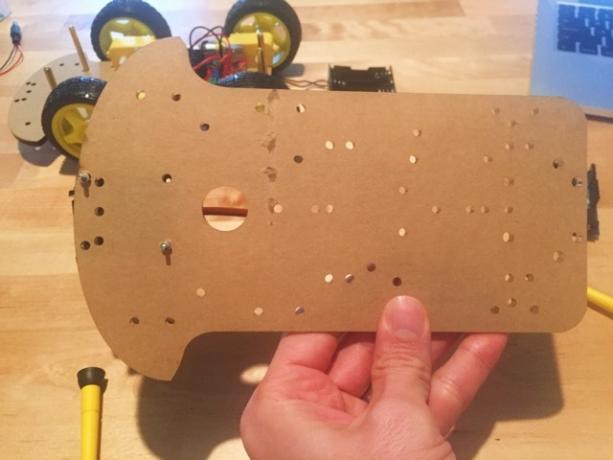
Nyní je čas začít tuto věc dávat dohromady. Uchopte horní část podvozku a postavte jej na měděné hřídele připojené ke spodní části a protáhněte dráty připojené k mostíku H otvorem ve středu podvozku. Připojte šest vodičů k I / O portům následujícím způsobem:
- ENA na I / O port 11
- ENB na I / O port 10
- A1 na I / O port 5
- Port A2 na I / O 6
- Port B1 až I / O 4
- Port B2 na I / O 3
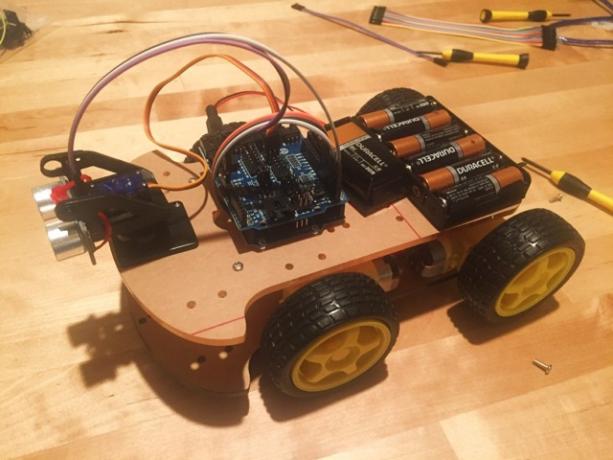
Nyní pomocí čtyř krátkých šroubů připevněte horní část podvozku k měděným hřídelím. Umístěte držák baterií na 6 AA na horní část podvozku (pokud je to možné, zašroubujte jej), připojte držák 9V buněk k Arduino a tento robot je připraven k rocku!
No, téměř připraven k rocku. Zatím nemá dost osobnosti.
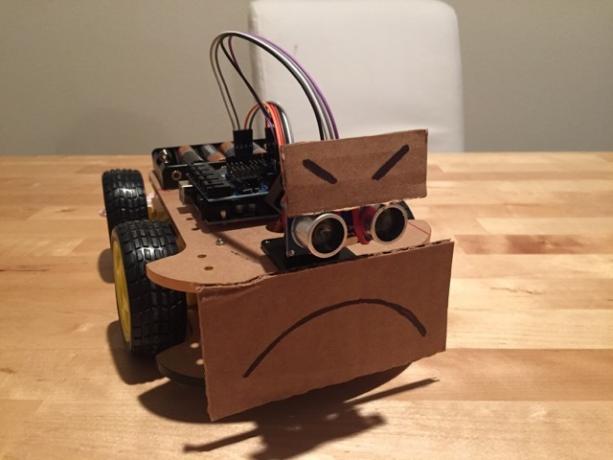
Tam jedeme. Teď mu dejte mozek. Pojďme udělat nějaké programování.
První věc, kterou uděláme, je test, abychom se ujistili, že most a motory jsou správně připojeny. Zde je rychlý náčrt to řekne botovi, aby jel půl sekundy vpřed, půl sekundy vzad, pak zahnul doleva a doprava
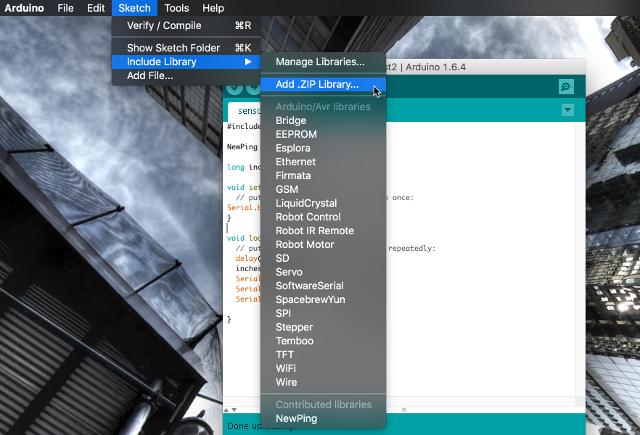
To je spousta kódu pro jednoduchý test, ale definování všech těchto funkcí usnadní pozdější vyladění. (Velké díky Billwaa za jeho blogový příspěvek na používání mostu H pro definování těchto funkcí.) Pokud se něco pokazí, zkontrolujte všechna vaše připojení a že dráty jsou připojeny ke správným kolíkům. Pokud všechno fungovalo, je čas přejít na test senzoru. Chcete-li použít ultrazvukový senzor, budete chtít stáhněte si knihovnu NewPinga poté použít Skica> Zahrnout knihovnu> Přidat knihovnu .ZIP… načíst knihovnu.
Ujistěte se, že je v horní části náčrtu uvedeno prohlášení o zahrnutí; pokud tak neuděláte Skica> Zahrnout knihovnu> NewPing. Po dokončení načtěte následující náčrt:
Nahrajte náčrt a pomocí sériového monitoru otevřete Nástroje> Sériový monitor. Měli byste vidět rychle se aktualizující posloupnost čísel. Držte ruku před senzorem a zkontrolujte, zda se toto číslo změní. Posuňte ruku dovnitř a ven a měli byste zjistit, jak daleko je vaše ruka od senzoru.
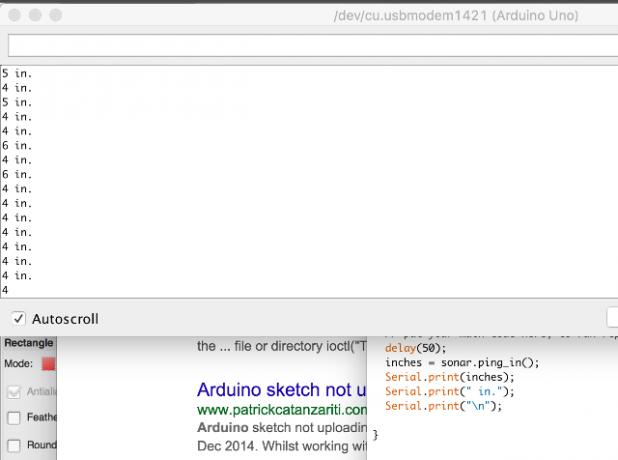
Pokud všechno fungovalo správně, je čas dát vše dohromady a nechat tuto věc běžet! Zde je kód pro robota Nyní. Jak asi víte, jedná se v podstatě o dvě testovací náčrtky spojené s přidaným příkazem if, který řídí chování robota. Dali jsme mu velmi jednoduché chování při vyhýbání se překážkám: pokud zjistí něco méně než čtyři palce, zálohuje se, zahne doleva a začne se znovu pohybovat. Zde je video robota v akci.
Dejte svému robotovi trochu života
Jakmile toto chování funguje správně, můžete přidat složitější chování; přinutit robota střídat se mezi otáčením doleva a doprava nebo náhodně vybrat; znít bzučák, pokud se k něčemu přiblíží; stačí se otočit, místo zálohování; jste opravdu omezeni svou fantazií. Můžete použít téměř cokoli ve vašem Startovací souprava Arduino Co je ve vaší Arduino Starter Kit? [Arduino začátečníci]Tváří v tvář s krabicí plnou elektronických součástek je snadné přemoci. Zde je průvodce přesně tím, co najdete v sadě. Přečtěte si více přidat další funkce. Také si všimnete, že jsme pro servo zatím nic nekódovali: ve skutečnosti můžete robotovi „oči“ pohybovat tam a zpět. snad je pomocí nich hledají cestu místo toho, aby zálohovali, kdykoli najde překážku přímo před sebou.
Dejte nám vědět, pokud se rozhodnete postavit tohoto robota nebo jiného a řekněte nám, jak se rozhodnete přizpůsobit jeho chování nebo vzhled. Pokud máte nějaké dotazy týkající se tohoto robota, zveřejněte je v komentářích níže a uvidím, jestli vám mohu pomoci!
Dann je konzultant pro obsahovou strategii a marketing, který pomáhá společnostem vytvářet poptávku a vede. Také blogy o strategii a marketingu obsahu na dannalbright.com.


